


本プロジェクトでは、「イラストで学ぶ人工知能概論」に登場するホイールダック2号を制作しました。
オムニホイールベースロボットにセンサ類を搭載する改造を行い、ホイールダック2号の情報をROS2システムで管理しています。また、Unityを用いた強化学習シミュレーションの構築も目指しています。
ホイールダック2号とは
ホイールダック2号は谷口忠大先生の著書「イラストで学ぶ人工知能概論」に登場する仮想的なロボットのことです。
ホイールダック2号が様々な課題を解決していく過程を通して、人工知能の基礎を分かりやすく学ぶことができます。
今回は試作開発として、ホイールダック2号の機能ベースを完成させることが目標です。
作成物
タスクの概要
ハードウェア
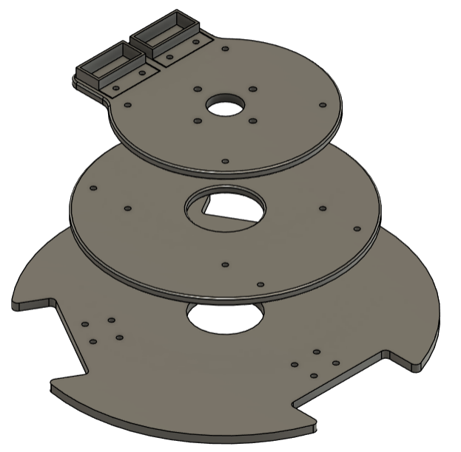
ベースは3Dプリンタで作成しました。
ホイールダック2号の立体感を出すために、3つのベースはそれぞれ異なるサイズになっています。
また、電気設計でははんだ付けが不要になるような設計にして効率化を図りました。
ソフトウェア
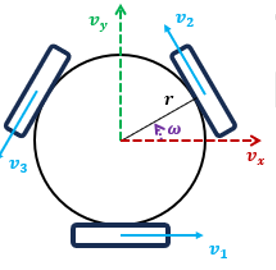
ROS2システムを使い、上位Nodeからの指令を取得してモータの回転方向やデューティ比を計算することでオムニホイールを動かしました。
また、正しくロータリエンコーダが動作していることを確認しました。(インクリメンタルエンコーダ)
シミュレーション
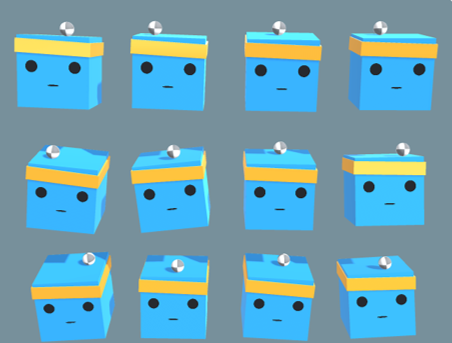
Unityによって強化学習シミュレーションを構築中です。
ML-AgentsというUnityを使って機械学習を行うことのできるフレームワークを使用する予定です。
感想
ホイールダック2号の開発は今後も続けていきたい!
開発を通して人工知能についても理解を深めていきたい。
ホイールダック2号の実機もシミュレーションも完成には届かなかったが、
それっぽいところまではできたと思う。
実機のデバッグとシミュレーションの構築は、今後空き時間に進めていきたい。